隨著我國經濟社會持續快速發展,群眾購車剛性需求旺盛,汽車保有量繼續呈快速增長趨勢,據交管局統計,截至2015 年底,全國機動車保有量達2.79 億輛,其中汽車1.72 億輛,新注冊量和年增量均達歷史最高水平;機動車駕駛人3.27 億人,其中汽車駕駛人超過2.8 億人。
伴隨機動車輛大規模普及應用,各種與機動車有關的違法事件開始滋生蔓延。收集、統計和分析道路交通事故,發現大部分交通事故都是因為機動車違章行駛而引起,尤以在交叉路口或路段上機動車闖紅燈造成的事故所占比例最大。近日,一個題為《一分鐘告訴你闖紅燈拍照原理》的動畫短片瘋傳網絡,很多網友看到一連串專業技術名詞后便信以為真。而且,不少媒體微信公眾號也紛紛轉載,更讓這個動畫短片火得一塌糊涂。筆者第一時間也看到這份視頻,覺得視頻的編者對視頻的內容的專業性有些不負責任,比較業余,通過堆砌一些高端的技術名詞包裝成一部臆想的作品,這對非現場執法系統更是一種誤導與曲解。
非現場執法系統作為一種采用現代高科技的非現場執法手段,通過近十年來的推廣應用工作,己成為交通管理工作中必不可少的裝備。非現場執法系統發展經過了標清到高清、部件化到一體化的過程,業務功能方面也經歷了從單一紅燈違章到智能復雜違法行為抓拍的過程,同時,系統架構也在技術的發展下趨于簡化及智能化。非現場執法設備最初采用標清攝像機抓拍,后端工控機進行識別,到近期采用高清嵌入式一體機抓拍,前端智能識別,系統穩定性、識別率、違法識別類型上都有了巨大的提升。
宇視科技作為國內智能交通領域的領軍企業,具有完整的智能交通解決方案。特別是智能嵌入式一體化非現場執法設備解決方案,系統中前端主要設備由嵌入式一體化高清攝像機、補光單元、網絡傳輸和中心管理等部分組成,系統核心設備為嵌入式一體化高清攝像機。該攝像機為其自主研發,具有完全自主知識產權,集抓拍、控制、識別、錄像、壓縮、傳輸于一體;具有先進的視頻檢測功能,可以對視頻圖像進行逐幀識別,同時自動匹配對應車道,對過往車輛進行軌跡跟蹤并做行為判斷,如有違法車輛即進行抓拍、車牌識別,錄像、存儲,處理結果上傳到后臺。同時系統兼顧卡口功能,即綠燈正常行駛的車輛,系統也可以進行記錄。

系統運行原理流程圖
系統運行原理圖如上:
而且就像前面提到的,目前的非現場執法系統并不僅只是為了監測路口闖紅燈的違法行為,針對道路口常見的調頭、壓線等違法行為,系統結合路道情況和分析的車輛行駛軌跡進行判定,如果判定是屬于違法調頭或壓線車輛都會進行記錄。
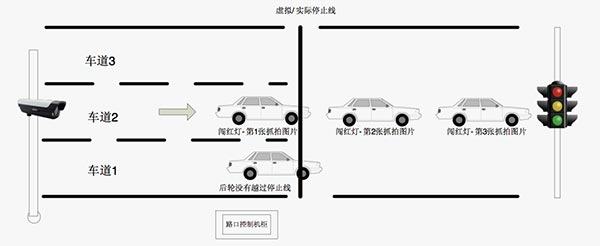
闖紅燈違法過程抓拍
其實對于闖紅燈違法過程抓拍在GA/T496-2014《闖紅燈自動記錄系統通用條件》有明確的規定,闖紅燈自動記錄系統應能至少記錄以下3張反映闖紅燈行為過程的圖片(: a)能反映機動車未到達停止線的圖片,并能清晰辨別車輛類型、交通信號燈紅燈、停止線;(b)能反映機動車已越過停止線的圖片,并能清晰辨別車輛類型、號牌號碼、交通信號燈紅燈、停止線;(c)能反映機動車與(b)圖片中機動車向前位移的圖片,并能清晰辨別車輛類型、交通信號燈紅燈、停止線。所以只要機動車違反交通信號燈紅燈亮時禁止通行的規定,越過停止線并繼續行駛,非現場執法系統就會按照規定中的要求對違法車輛自動采集三張高清圖片,記錄車輛闖紅燈動態過程。
高清圖像被系統分析并解讀出車輛號牌,此后系統將圖像壓縮成JPEG 文件格式,并在其上方或者下方以相同格式粘貼上地點、車道編號、方向、時間( 年、月、日、時、分、秒) 等相關OSD 信息,所存圖像中的車輛車牌號碼、車牌顏色等信息清晰可見,最后將圖片存入指定路徑,將相關信息添加到相應的數據庫,以上過程完成了路口單次闖紅燈或卡口記錄的檢測、數據生成和數據存儲。
大家可能覺得上述的描述比較抽象,那么下面用圖片(如圖1~2)說明更加有助于理解:
目前常見的電警處罰類型有闖紅燈違法行為、不按規定車道行駛、占用專用車道、逆行、違法壓線、跨線行駛、闖禁令、違反禁止標線、單雙號及道路貨車時段限行、車輛超速、異地牌照、違法掉頭等等。
新一代高清非現場執法設備已經得到了越來越廣泛的應用,并且在穩定性、證據合法性方面都有極大的提高。這使得非現場執法設備對城市交通的控制作用不言而喻。宇視科技的非現場執法系統具備以下完整的業務功能:
◆ 實現全天候視頻監控和抓拍圖片監控,自動適應不同光照條件,提供清晰的車輛記錄圖片;
◆ 對每輛通過路口車輛進行抓拍,并通過車牌識別系統進行識別,記錄所有通過路口車輛車牌號碼、時間等信息。有了這些基礎數據,就可以對一條線路、一個片區、整個城市的車輛出行線路進行分析;
◆ 車輛查詢和車輛統計,可基于時間、空間的不同緯度進行流量分析;
◆ 通過系統可以通過對視頻的智能分析判斷逆向行駛、壓線、跨線、不按標線行駛等違法行為,系統抓拍三張違法圖片,以記錄違法的整個過程。

圖1:路口闖紅燈

圖2:逆行
另外針對《一分鐘告訴你闖紅燈拍照原理》的動畫短片中一些誤導內容,筆者也在此做出更正:
動畫短片中提到車牌上小圓點是用稀土金屬鑲嵌上去的,作用是為了電子對焦。其實不然,系統前端攝像單元上的鏡頭在調整好最適宜畫面的清晰度后,一般是由螺絲鎖死的,拍攝過程中并不會持續對焦。對于車牌識別采用的是最先進的圖像識別算法,根本不需要什么稀土金屬來對焦,小圓點只是車牌上的一個間隔符號。另外短片中所說的紅燈亮后三秒鐘非現場執法系統才啟動,綠燈將要亮時提前兩秒關閉系統都是沒有根據的。根據GA/T 496-2014《闖紅燈自動記錄系統通用條件》,明確規定至少3 張反映闖紅燈行為過程的圖片,所以只要是紅燈亮起的瞬間,車輛存在完整的闖紅燈過程,那么車輛就會被抓拍。標準還要求非現場執法系統將違法行為定位到駕駛人,提供分辨率應不小于50×50 像素點的人物圖片,作為認定機動車闖紅燈違法駕駛人的參考資料,這在一定程度上制約了“買分賣分”現象,為交警部門規范違法處罰流程提供了技術支撐。
筆者了解到目前宇視科技最新推出的700W 非現場執法攝像單元更是采用了低照度的感光芯片,不僅能夠做到一個攝像機覆蓋三車道,而且在只配置內置LED 補光燈的情況下對路口包括闖紅燈等違法行為進行抓拍。以往很多駕駛員是依據是否被閃光補光作為自己有沒有被非現場執法設備抓拍的依據,其實在你還在慶幸自己闖紅燈行為沒有抓拍的時候,非現場執法系統早就已經將你的違法行為上傳到交通管控平臺。
很多駕駛員看了《一分鐘告訴你闖紅燈拍照原理》動畫短片后,以為自己終于學會了怎么技術性規避闖紅燈行為被抓拍,其實不然,目前非現場執法系統已經越來越先進和智能化,想用鉆漏洞的方式逃避交通違法的處罰已經不太可能。所以為了自己也為了他人的安全,最好的規避闖紅燈辦法就是老老實實的遵守交通規則,寧停三分不搶一秒。
 浙公網安備
33010802004032號
浙公網安備
33010802004032號

